
九江西门子S7-300模块代理商九江西门子S7-300模块代理商九江西门子S7-300模块代理商九江西门子S7-300模块代理商九江西门子S7-300模块代理商
三菱PLC定位指令使用方法详解,附应用案例
一、动作描述
1. 分别介绍各个定位指令的使用规则;
2. 使用定位指令控制伺服步进,(以脉冲加方向的方式);
3. M8029应用注意事项。
| 6ES7505-0KA00-0AB0 | PS:25 W,额定输入电压 DC 24 V |
二、硬件设备
1. 三菱PLC :FX3U-32MT
2. 步进电机和步进驱动器各一台
三、软件
三菱编程软件:GX Works2/ GX Works3

四、指令的介绍
使用输出高速脉冲位置控制时,控制需要理解三个概念:
1、位置移动速度(脉冲频率,每秒发送多少个脉冲)
2、位置移动距离(脉冲数量,脉冲数量对应滑台的距离)
3、位置移动方向(方向输出或双向脉冲,控制电机前进或者后退)
1 PLSY
16位运算指令PLSY,从输出Y(D)·中输出(S1)·个数频率为(S2)·的脉冲串。

S1中指定频率。允许设定范围:1~32767(Hz)
S2中指定发出的脉冲量,允许设定范围:1~32767(PLS)

32位运算指令DPLSY
输出D中输出[S1· 1、S1]个数频率为[S2 1、S2]的脉冲串。

在[S1 1、S1]中指定频率,使用高速输出特殊适配器时,允许设定范围:1~200,000(Hz)
在使用FX3G·FX3U·FX3UC本体PLC时,允许设定范围: 1~100,000(Hz)
在[S2 1、S2]中指定发出的脉冲量,允许设定范围:1~2,(PLS)
在指令中指定有脉冲输出的Y编号,允许设定范围:Y000、Y001 、Y002、Y003
**位置当前值数据寄存器
1、当前值是以原点为参考点的**地址值。工件移动时其数值随工件移动而变化。其数值表示工件当前位置。
2、当PLC断电时,当前值寄存器的当前值就会被清除而变0。
3、对不同系列的PLC,对应不同的脉冲输出口,当前值寄存器的编号是不同的。
4、当驱动条件成立时,执行PLSY指令,从输出口(Y0\Y1\Y2)输出一个频率为S1,脉冲个数为S2,占空比为50%的脉冲串,作定位控制命令用时,需要指定方向输出口Y,PLSY没有加减速时间设置,定位容易丢失脉冲或者过冲。
5、PLSY指令驱动后,采用中断方式输出脉冲串,不受扫描周期影响。如果在执行过程中指令驱动条件断并,输出马上停止,驱动后,又会从*初开始输出。该指令一般用来控制伺服或者步进电机的手动运行。
6、把指令中脉冲个数设置为K0,则指令的功能变为输出无数个脉冲串,如下图1,图2为对应的特殊软原件。
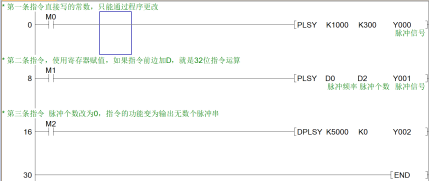
图1

图2
2 PLSV

S 输出脉冲频率或其存储地址
D1 指定脉冲串输出口,Y0或Y1指定旋转方向的输出端口,
D2 指定旋转方向的输出端口,ON:正转,OFF:反转。
指令前面加D,就是32位指令。
当驱动条件成立时,从输出口D1输出频率为S的脉冲串。电机转向信号由D2口输出,如S为正值,则D2输出为ON,电机正转。如S为负值,则D2输出为OFF,电机反转。
1、 在脉冲输出过程中,如果将S变为K0,则脉冲输出会马上停止。同样,如果驱动条件在脉冲输出过程中断开,则输出马上停止。
2、 PLSV指令为可随时改变脉冲的频率,但在脉冲输出过程中,**不要改变输出脉冲的方向(即由正频率变为负频率或)。如果要变更方向,可先将输出频率设为K0,并设定电机充分停止时间,再输出不同方向的频率值。
3、 PLSV指令的缺点是在开始,频率变化和停止时均没有加减速动作。这就影响了指令的使用,常常把PLSV指令和斜坡指令RAMP配合使用,利用斜坡指令RAMP的递增,递减速功能来实现PLSV指令的加,减速。
4、 PLSV指令的缺点是在开始,频率变化和停止时均没有加减速动作。这就影响了指令的使用,常常把'PLSV指令和斜坡指令RAMP配合使用,利用斜坡指令RAMP的递增,递减速功能来实现PLSV指令的加,减速。正常不做定位指令使用。
3 PLSR 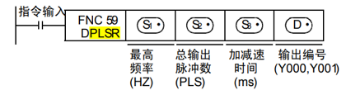

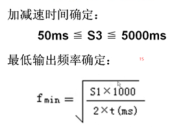
1、 当驱动条件成立时,从输出口D输出*高频率为S1,脉冲个数为S2,加减速时间为S3,占空比为50%的脉冲串。加减速时间不能分开控制,PLSR脉冲指令以一定的频率发出目标值个脉冲,在指令中可以设置脉冲频率、脉冲总数、和发出脉冲的输出点;但只能控制脉冲,如果是脉冲加方向的脉冲模式,那方向点要另选一个普通开关点控制。方向信号先于脉冲指令给定。
频率和脉冲数设定
2、 输出频率S1的设定范围是[(FX2N)10~20000HZ] [(FX1S)10~100000HZ],频率设定必须是10的整数倍。2、输出脉冲数的设定范围是:16位运算为110~32767,32位运算为110~。当设定值不满110时,脉冲不能正常输出。
3、 M8029:脉冲发完后,M8029闭合。当M0断开后,M8029自动断开。
4、 M8147:Y0输出脉冲时闭合,发完后脉冲自动断开,用下降沿触发转下一步;
5、 M8148:Y1输出脉冲时闭合,发完后脉冲自动断开,用下降沿触发转下一步;
6、 M8149:Y2输出脉冲时闭合,发完后脉冲自动断开,用下降沿触发转下一步;
7、 D8140:记录Y0输出的脉冲总数,32位寄存器
8、 D8142:记录Y1输出的脉冲总数,32位寄存器
9、 D8136:记录Y0和Y1输出的脉冲总数,32位寄存器 (针对FX1S)

S1 目标的**位置脉冲量
S2 输出脉冲频率
D1 输出脉冲端口,仅能Y0或Y1
D2. 指定旋转方向的输出端口,ON:正转,OFF:反转
当驱动条件成立时,输出口D1发出定位脉冲,电机以转速S2转动到位置为**位置值S1处。转向由S1与当前位置值比较确定,S1大于当前值时,D2为ON,电机正转;当S1小于当前值时,D2为OFF,电机反转。
与DRVI指令相同
1、指令格式相同
2、特殊软元件相同
3、速度与位置参数相同
4、运行时序相同
5、电机的转向信号都是指令自动完成
与DRVI指令不同
目标位置表示不同
DRVI是用于相对于当前位置的移动量来表示目标位置,而DRVA是用相对于原点的**位置值来表示目标位置。
指令中所指定的脉冲数量不同
DRVI指令中所指定的脉冲数量就是PLC输出的数量。而DRVA指令中所指定的数量不是PLC实际发出脉冲的数量。其实际输出脉冲数是与指令驱动前当前值相运算的结果。
暂停再驱动效果不同
DRVI指令暂停后再驱动不能继续原来的运行,而DRVA指令暂停后再驱动可以继续原来的运行。
5 DRVI
S1 输出脉冲量(位置移动距离)
S2 输出脉冲频率(位置移动速度)
D1 输出脉冲端口,仅能Y0或Y1
D2 指定旋转方向的输出端口(位置移动方向), ON:正转,OFF:反转.
相对定位,相对位移是指移位后位置坐标与当前位置坐标的位移量。
位置控制三要素
1、位置移动方向(电机转动方向)
2、位置移动速度(电机转速)
3、位置移动距离(相对或**)
当驱动条件成立时,输出口D1发出定位脉冲,电机以转速S2转动S1个脉冲数。转向由S1的正、负确定。S1为正,D2为ON,电机正转;S1为负,D2为OFF,电机反转。
*高速度
电机运行时出*高速度,电机实际运行速度必须小于该值。
*高速度存于寄存器
九江西门子S7-300模块代理商 九江西门子S7-300模块代理商